Usage of Active Magnetic Bearing in Oil & Gas industry
Abstract
Active magnetic bearing (AMB) technology is used to overcome the deficiencies of conventional journal or ball bearings. They have shown their ability to work with no lubrication or to run at high speed. Utilizing a controller for the electrical current, active magnetic bearings could levitate the shaft of a pump, compressor or an electro motor in the center of a rotating space. There are numerous advantages to using magnetic bearings, the most notable aspect is being contact‐free, and in that the magnetic force is used to support the rotating object enabling very high rotational speeds to be realized. Maintenance is also decreased due to the absence of surface wear. The noise would be decreased so much and consumption of energy drops because of avoiding friction loss. A unique ability of an AMB versus conventional bearings is changing the characteristics of the bearings during operation. These characteristics correspond to the stiffness and damping of conventional bearings that are tuned via a digital feedback control system. The control system uses the PID algorithm in order to tune the current in the electro magnets. This current produces magnetic force. The magnetic force used in magnetic bearings can be divided into two categories of how the force is created: reluctance force and Lorentz force. In this paper, it would be shown that how active magnetic bearing uses the reluctance force that results from a difference of magnetic permeability between two materials to levitate the shafts of rotating equipments by the aid of ferromagnetic materials
ﭼﻜﻴﺪه
ﺗﻜﻨﻮﻟﻮژي، ﻃﺮاﺣﻲ و ﺑﻜﺎرﮔﻴﺮي ﺑﻴﺮﻳﻨﮓ ﻣﻐﻨﺎﻃﻴﺴﻲ ﻓﻌﺎل (AMB) ﺑﻤﻨﻈﻮر رﻓﻊ ﺿﻌﻔﻬﺎ در ﺑﻴﺮﻳﻨﮕﻬﺎي ﻣﺘﻌﺎرف ﻣﻲﺑﺎﺷﺪ. وﻳﮋﮔﻲ ﺑﺰرگ اﻳﻦ ﺑﻴﺮﻳﻨﮕﻬﺎ ﻛﺎر در ﺳﺮﻋﺘﻬﺎي ﺑﺴﻴﺎر ﺑﺎﻻ ﺑﺪون اﺳﺘﻔﺎده از ﺳﻴﺴﺘﻢ روﻏﻦﻛﺎري اﺳﺖ. ﺑﻴﺮﻳﻨﮕﻬﺎي ﻣﻐﻨﺎﻃﻴﺴﻲ ﺑﺎ ﺑﻬﺮه ﮔﻴﺮي از ﻳﻚ ﻛﻨﺘﺮﻟﺮ ﺟﺮﻳﺎن اﻟﻜﺘﺮﻳﻜﻲ، ﻣﻌﻠﻖ ﺷﺪن ﺷﻔﺖ ﻣﻮﺗﻮرﻫﺎ، ﻛﻤﭙﺮﺳﻮرﻫﺎ و ﻳﺎ ﭘﻤﭙﻬﺎ را در ﻣﺮﻛﺰ ﻓﻀﺎي ﭼﺮﺧﺶ اﻣﻜﺎﻧﭙﺬﻳﺮ ﻣﻲ ﺳﺎزﻧﺪ. ﻋﺪم وﺟﻮد ﺗﻤﺎس ﻣﻜﺎﻧﻴﻜﻲ ﺑﻴﻦ ﺳﻄﺢ دوار و ﺳﻄﺢ ﺛﺎﺑﺖ ﺑﺪﻧﻪ، اﻣﻜﺎن دﺳﺘﻴﺎﺑﻲ ﺑﻪ ﺳﺮﻋﺘﻬﺎي ﺑﺴﻴﺎر ﺑﺎﻻ و ﻛﺎﻫﺶ ﺷﺪﻳﺪ ﺗﻌﻤﻴﺮات دورهاي ﺑﻪ دﻟﻴﻞ ﻧﺒﻮد ﺳﺎﻳﺶ را ﻓﺮاﻫﻢ ﻣﻲآورد. ﺑﺎ ﺣﺬف ﺗﻠﻔﺎت اﺻﻄﻜﺎك، ﺳﺮ و ﺻﺪا، ﻟﺮزش و ﻣﺼﺮف اﻧﺮژي ﻧﻴﺰ ﻛﺎﻫﺶ ﻗﺎﺑﻞ ﻣﻼﺣﻈﻪاي ﻣﻲﻳﺎﺑﺪ. ﻗﺎﺑﻠﻴﺖ وﻳﮋه ﺑﻴﺮﻳﻨﮕﻬﺎ ﻣﻐﻨﺎﻃﻴﺴﻲ ﻧﺴﺒﺖ ﺑﻪ ﺑﻴﺮﻳﻨﮕﻬﺎي ﻣﺘﻌﺎرف ﺗﻐﻴﻴﺮ ﭘﺎراﻣﺘﺮﻫﺎي ﻣﻌﺎدل ﻓﻨﺮﻳﺖ (Stiffness) و ﻣﻴﺮاﻳﻲ (Damping) اﺳﺖ، ﻛﻪ ﺑﺎ ﻛﻨﺘﺮﻟﺮ ﻓﻴﺪﺑﻚ دار ﺗﻨﻈﻴﻢ ﻣﻲﺷﻮﻧﺪ. اﻳﻦ ﻛﻨﺘﺮﻟﺮ از اﻟﮕﻮرﻳﺘﻢ PID ﺑﺮاي ﺗﻨﻈﻴﻢ ﺟﺮﻳﺎن در اﻟﻜﺘﺮوﻣﮕﻨﺘﻬﺎ اﺳﺘﻔﺎده ﻣﻲﻛﻨﺪ و ﺑﻪ وﺳﻴﻠﻪ ﻫﻤﻴﻦ ﺟﺮﻳﺎن اﺳﺖ ﻛﻪ ﻧﻴﺮوي ﻣﻐﻨﺎﻃﻴﺴﻲ اﻳﺠﺎد ﻣﻲﺷﻮد. ﺑﻪ ﻃﻮر ﻛﻠﻲ ﻧﻴﺮوﻫﺎي ﻣﻐﻨﺎﻃﻴﺴﻲ ﺑﻪ دو دﺳﺘﻪ ﺗﻘﺴﻴﻢ ﻣﻲﺷﻮﻧﺪ: ﻧﻴﺮوي رﻟﻮﻛﺘﺎﻧﺴﻲ و ﻧﻴﺮوي ﻟﻮرﻧﺘﺰ. در اﻳﻦ ﻣﻘﺎﻟﻪ ﻧﺸﺎن داده ﻣﻲﺷﻮد ﻛﻪ ﭼﮕﻮﻧﻪ ﺑﻴﺮﻳﻨﮓ ﻣﻐﻨﺎﻃﻴﺴﻲ ﻓﻌﺎل ﺑﺎ اﺳﺘﻔﺎده از ﻧﻴﺮوي رﻟﻮﻛﺘﺎﻧﺴﻲ ﻛﻪ از اﺧﺘﻼف ﻧﻔﻮذﭘﺬﻳﺮي ﻣﻐﻨﺎﻃﻴﺴﻲ ﺑﻴﻦ دو ﺟﺴﻢ ﺣﺎﺻﻞ ﻣﻲﺷﻮد ﺑﻪ ﻛﻤﻚ ﻣﻮاد ﻓﺮوﻣﻐﻨﺎﻃﻴﺲ، ﺷﻔﺖ ﺗﺠﻬﻴﺰات دوار را ﺑﻪ ﺻﻮرت ﻣﻌﻠﻖ در ﻫﻮا ﻧﮕﻪ ﻣﻲدارد.
ﻣﻘﺪﻣﻪ
ﺑﻪ ﻃﻮر ﻛﻠﻲ، ﺗﺠﻬﻴﺰات دوار در ﺻﻨﻌﺖ ﻛﺎرﺑﺮد ﺑﺴﻴﺎري دارﻧﺪ و ﺗﻤﺎم اﻳﻦ ﺗﺠﻬﻴﺰات ﺑﻪ دﻟﻴﻞ وﺟﻮد ﺑﺨﺶﻫﺎي ﻣﺘﺤﺮك ﻧﻴﺎز ﺑﻪ ﺗﻌﻤﻴﺮ و ﻧﮕﻬﺪاري دارﻧﺪ و ﺑﺎﻋﺚ اﻳﺠﺎد ﻧﻮﻳﺰ ﺻﻮﺗﻲ و ﻣﺼﺮف ﺑﺎﻻي اﻧﺮژي ﻣﻲﺷﻮﻧﺪ. ﺑﻴﺮﻳﻨﮓ ﻳﻜﻲ از ﻣﻬﻢﺗﺮﻳﻦ ﺑﺨﺶﻫﺎي اﻳﻦ ﺗﺠﻬﻴﺰات اﺳﺖ ﻛﻪ وﻇﻴﻔﻪ ﺗﻌﻠﻴﻖ ﺑﺨﺶ ﻣﺘﺤﺮك را ﺑﻪ ﻋﻬﺪه دارد. در ﺑﻴﺮﻳﻨﮕﻬﺎي ﻣﻜﺎﻧﻴﻜﻲ ﻣﺘﻌﺎرف ﻣﺜﻞ Bush Bearing, Roll Bearing و , Ball Bearing ﺑﻪ دﻟﻴﻞ وﺟﻮد اﺻﻄﻜﺎك، اﻛﺜﺮ ﻣﺸﻜﻼت ﻣﺮﺑﻮط ﺑﻪ ﺗﻌﻤﻴﺮ و ﻧﮕﻬﺪاري در ﺗﺠﻬﻴﺰات دوار را ﺑﻪ ﺧﻮد اﺧﺘﺼﺎص ﻣﻲدﻫﺪ و در ﺑﻴﺮﻳﻨﮕﻬﺎي ﻫﻴﺪروﻟﻴﻜﻲ(Oil Film Bearing) ﻧﻴﺰ ﺑﻪ ﻋﻠﺖ ﭘﻴﭽﻴﺪﮔﻲ ﺳﻴﺴﺘﻢ و ﻓﺸﺎر زﻳﺎد روﻏﻦ ﺣﺠﻢ ﺑﺎﻻﻳﻲ از ﻛﺎر ﺗﻌﻤﻴﺮ و ﻧﮕﻬﺪاري ﺑﺎ ﻫﺰﻳﻨﻪ ﺑﺎﻻ ﺑﺎﻳﺪ اﻧﺠﺎم ﺷﻮد. ﺿﻤﻨﺎٌ ﺑﻪ دﻟﻴﻞ ﺗﻠﻔﺎت ﻧﺎﺷﻲ از اﺻﻄﻜﺎك ﻣﻴﺰان ﻣﺼﺮف اﻧﺮژي ﻧﻴﺰ اﻓﺰاﻳﺶ ﭘﻴﺪا ﻣﻲﻛﻨﺪ و ﻫﻤﭽﻨﻴﻦ ﺑﺎﻋﺚ اﻳﺠﺎد ﻣﺤﺪودﻳﺖ در ﺳﺮﻋﺖ ﺑﺎﻻ ﻣﻲﮔﺮدد. ﻟﺬا واﺿﺢ اﺳﺖ در ﺻﻮرت ﺣﺬف ﻋﺎﻣﻞ اﺻﻄﻜﺎك ﻣﺰاﻳﺎي زﻳﺎدي ﺑﺮاي ﺗﺠﻬﻴﺰات دوار ﺑﻪ وﺟﻮد ﻣﻲآﻳﺪ. ﺑﺎ اﺳﺘﻔﺎده از ﺑﻴﺮﻧﮕﻬﺎي ﻣﻐﻨﺎﻃﻴﺴﻲ ﻓﻌﺎل ﻣﻲﺗﻮان ﻋﺎﻣﻞ اﺻﻄﻜﺎك را ﺣﺬف ﻛﺮد. در اﻳﻦ ﺑﻴﺮﻳﻨﮕﻬﺎ ﻋﻤﻼٌ ﻫﻴﭻ ﺗﻤﺎﺳﻲ ﺑﻴﻦ ﺑﺨﺶ دوار و ﺛﺎﺑﺖ وﺟﻮد ﻧﺪارد و ﺑﺨﺶ دوار ﺑﻪ ﻛﻤﻚ ﻧﻴﺮوي ﻣﻐﻨﺎﻃﻴﺴﻲ در ﻫﻮا ﻣﻌﻠﻖ ﻣﻲﻣﺎﻧﺪ و ﻫﻤﭽﻨﻴﻦ ﻫﻴﭻ ﻣﺤﺪودﻳﺘﻲ ﺑﺮاي ﺳﺮﻋﺖ وﺟﻮد ﻧﺨﻮاﻫﺪ داﺷﺖ. ﺑﻪ ﻃﻮر ﻛﻠﻲ ﺑﻴﺮﻳﻨﮕﻬﺎي ﻣﻐﻨﺎﻃﻴﺴﻲ ﺳﻪ ﻧﻮع ﻫﺴﺘﻨﺪ، ﺷﺎﻣﻞ ﻏﻴﺮﻓﻌﺎل، ﻓﻌﺎل و ﻫﻴﺒﺮﻳﺪ. در ﻧﻮع ﻏﻴﺮﻓﻌﺎل از آﻫﻨﺮﺑﺎﻫﺎي داﺋﻤﻲ ﺑﺮاي ﻣﻌﻠﻖ ﻛﺮدن ﺷﻔﺖ اﺳﺘﻔﺎده ﻣﻲﺷﻮد ﻛﻪ ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ ﺛﺎﺑﺘﻲ دارﻧﺪ. در ﻧﻮع ﻓﻌﺎل از آﻫﻨﺮﺑﺎﻫﺎي اﻟﻜﺘﺮﻳﻜﻲ (Magnet Electro) ﺑﺮاي اﻳﺠﺎد ﻣﻴﺪان اﺳﺘﻔﺎده ﻣﻲﺷﻮد ﻛﻪ ﺷﺪت ﻣﻴﺪان آﻧﻬﺎ را ﻣﻲ ﺗﻮان ﺑﺎ ﺗﻐﻴﻴﺮ ﺟﺮﻳﺎن ﺑﺮ اﺳﺎس ﻧﻴﺎز ﭘﺮوﺳﻪ ﺗﻨﻈﻴﻢ ﻛﺮد و ﻧﻮع ﻫﻴﺒﺮﻳﺪي ﻛﻪ از ﻫﺮ دو ﻧﻮع ﻗﺒﻠﻲ ﺳﻮد ﻣﻲﺑﺮد. در ﻣﻘﺎﻟﻪ ﺣﺎﺿﺮ ﻛﻪ ﺑﺎ ﻫﺪف اﺳﺘﻔﺎده از اﻳﻦ ﺗﻜﻨﻮﻟﻮژي از ﻧﻮع ﻓﻌﺎل در ﺻﻨﺎﻳﻊ ﻧﻔﺖ وﮔﺎز ﺗﻨﻈﻴﻢ ﺷﺪه، اﺻﻮل ﻃﺮاﺣﻲ و ﺳﺎﺧﺖ ﺑﺨﺸﻬﺎي ﻣﺨﺘﻠﻒ اﻳﻦ وﺳﻴﻠﻪ ﺑﻴﺎن ﮔﺮدﻳﺪه اﺳﺖ.
ﺳﺎﺧﺘﺎر ﻛﻠﻲ ﺑﻴﺮﻳﻨﮓ ﻣﻐﻨﺎﻃﻴﺴﻲ ﻓﻌﺎل
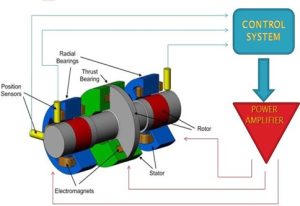
اﻳﻦ ﺑﻴﺮﻳﻨﮕﻬﺎ ﺷﺎﻣﻞ ﭼﻨﺪ ﺑﺨﺶ اﺻﻠﻲ ﻣﻲﺷﻮﻧﺪ ﻛﻪ ﺑﻪ ﺗﺮﺗﻴﺐ: اﻟﻜﺘﺮو ﻣﮕﻨﺘﻬﺎي ﺷﻌﺎﻋﻲ(Radial Bearing) و ﻣﺤﻮري(Thrust Bearing) ، ﺳﻨﺴﻮرﻫﺎي ﻣﻮﻗﻌﻴﺖ(Position Sensor) ، ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل(Control System) و ﺗﻘﻮﻳﺖﻛﻨﻨﺪهﻫﺎي ﻗﺪرت(Power Amplifier) هستند.
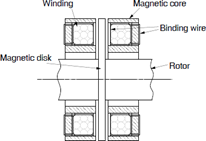
ﻫﻤﭽﻨﻴﻦ ﺑﺮاي ﻛﺎﻣﻞ ﺷﺪن ﺑﻴﺮﻳﻨﮓ ﻣﻐﻨﺎﻃﻴﺴﻲ ﻧﻴﺎز اﺳﺖ ﺗﻐﻴﻴﺮاﺗﻲ روي ﺷﻔﺖ ﻧﻴﺰ اﻳﺠﺎد ﺷﻮد. ﻫﻤﺎﻧﻄﻮر ﻛﻪ در ﺷﻜﻞ 1 ﻧﺸﺎن داده ﺷﺪه اﺳﺖ ﻳﻚ دﻳﺴﻚ و ورﻗﻪﻫﺎي ﻓﺮوﻣﻐﻨﺎﻃﻴﺴﻲ(Ferro Magnetic) روي ﺷﻔﺖ ﻧﺼﺐ ﺷﺪه اﻧﺪ (ﺑﺨﺶ ﻗﺮﻣﺰ رﻧﮓ). دﻳﺴﻚ ﻧﺼﺐ ﺷﺪه ﻛﻪ از ﺟﻨﺲ ﻣﻮاد ﻓﺮوﻣﻐﻨﺎﻃﻴﺲ اﺳﺖ ﺑﻪ ﻋﻨﻮان ﻣﺴﻴﺮ ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ ﺣﺎﺻﻞ از ﺑﻴﺮﻳﻨﮓ ﻣﺤﻮري روي ﺷﻔﺖ اﺳﺘﻔﺎده ﻣﻲﺷﻮد. ﭼﮕﻮﻧﮕﻲ اﻳﺠﺎد اﻳﻦ ﺷﺎر ﻣﻐﻨﺎﻃﻴﺴﻲ در اداﻣﻪ ﻣﻘﺎﻟﻪ ﺗﻮﺿﻴﺢ داده ﺧﻮاﻫﺪ ﺷﺪ. ورﻗﻪﻫﺎي از ﺟﻨﺲ ﻣﻮاد ﻓﺮوﻣﻐﻨﺎﻃﻴﺲ ﻧﻴﺰ ﺑﻪ ﺗﻘﻮﻳﺖ ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ ﺣﺎﺻﻞ از ﺑﻴﺮﻳﻨﮕﻬﺎي ﺷﻌﺎﻋﻲ روي ﺑﺪﻧﻪ روﺗﻮر ﻛﻤﻚ زﻳﺎدي ﻣﻲﻛﻨﻨﺪ.
ﻣﻜﺎﻧﻴﺰم ﻛﺎر ﻳﻚ ﺳﻴﺴﺘﻢ ﻛﺎﻣﻞ ﺑﻴﺮﻳﻨﮓ ﻣﻐﻨﺎﻃﻴﺴﻲ ﻛﻪ ﺷﺎﻣﻞ دو ﻋﺪد ﺑﻴﺮﻳﻨﮓ ﺷﻌﺎﻋﻲ در دو ﺳﺮ ﺷﻔﺖ و ﻳﻚ ﺑﻴﺮﻳﻨﮓ ﻣﺤﻮري در ﻳﻜﻲ از دو ﺳﺮ ﺷﻔﺖ ﻣﻲﺷﻮد ﺑﻪ اﻳﻦ ﺻﻮرت اﺳﺖ ﻛﻪ ﺳﻨﺴﻮرﻫﺎي ﻣﻮﻗﻌﻴﺖ ﻛﻪ ﺣﺪاﻗﻞ ﺳﻪ ﻋﺪد ﻣﻲ ﺑﺎﺷﻨﺪ (دوﻋﺪد ﺑﺮاي ﺑﻴﺮﻳﻨﮕﻬﺎي ﺷﻌﺎﻋﻲ و ﻳﻚ ﻋﺪد ﺑﺮاي ﺑﻴﺮﻳﻨﮕﻬﺎي ﻣﺤﻮري)، ﻣﻮﻗﻌﻴﺖ ﺷﻔﺖ را ﺑﺎ دﻗﺖ ﺑﺴﻴﺎر ﺑﺎﻻ ﺑﺮاي ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل ﻓﺮاﻫﻢ ﻣﻲﻛﻨﺪ. ﺳﭙﺲ ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل ﺑﺎ ﺗﻨﻈﻴﻢ ﺟﺮﻳﺎن اﻟﻜﺘﺮوﻣﮕﻨﺘﻬﺎ، ﺷﺪت ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ را ﻛﻨﺘﺮل ﻣﻲﻛﻨﺪ ﺑﻪ ﻃﻮري ﻛﻪ ﺷﻔﺖ در ﻣﺮﻛﺰ ﻓﻀﺎي ﺛﺎﺑﺖ ﺑﻤﺎﻧﺪ. ﻫﻤﻴﻦ ﻛﺎر ﺑﺮاي ﺑﻴﺮﻳﻨﮓ ﻣﺤﻮري ﻧﻴﺰ اﻧﺠﺎم ﻣﻲﺷﻮد و ﺑﺎ اﺳﺘﻔﺎده از ﻳﻚ ﺳﻨﺴﻮر ﻛﻪ در راﺳﺘﺎي ﻣﺤﻮر ﺷﻔﺖ و در ﻳﻜﻲ از دو ﺳﺮ ﺷﻔﺖ ﻧﺼﺐ ﺷﺪه اﺳﺖ، ﻣﻮﻗﻌﻴﺖ ﻣﺤﻮري ﺷﻔﺖ ﻧﻴﺰ آﺷﻜﺎر ﻣﻲﺷﻮد ﺗﺎ ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل ﺑﺘﻮاﻧﺪ ﺑﻪ درﺳﺘﻲ ﺟﺮﻳﺎن اﻟﻜﺘﺮوﻣﮕﻨﺘﻬﺎي ﻣﺤﻮري را ﻧﻴﺰ ﺗﻨﻈﻴﻢ ﻛﻨﺪ. ﺑﻪ ﻋﻠﺖ ﺿﻌﻴﻒ ﺑﻮدن ﺳﻴﮕﻨﺎل ﻛﻨﺘﺮﻟﻲ ﺗﻮﻟﻴﺪ ﺷﺪه ﺗﻮﺳﻂ ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل، اﻳﻦ ﺳﻴﮕﻨﺎل ﻧﻤﻲﺗﻮاﻧﺪ ﺑﻪ ﺻﻮرت ﻣﺴﺘﻘﻴﻢ ﺑﻪ اﻟﻜﺘﺮوﻣﮕﻨﺘﻬﺎ اﻋﻤﺎل ﺷﻮد، ﭘﺲ ﻻزم اﺳﺖ ﻛﻪ ﺗﻮان اﻳﻦ ﺳﻴﮕﻨﺎل ﻛﻨﺘﺮل ﺑﺎ ﻧﺴﺒﺘﻲ ﻣﺸﺨﺺ ﺗﻘﻮﻳﺖ ﮔﺮدد ﻛﻪ اﻳﻦ ﻛﺎر ﺗﻮﺳﻂ ﺗﻘﻮﻳﺖﻛﻨﻨﺪهﻫﺎي ﻗﺪرت اﻧﺠﺎم ﻣﻲﺷﻮد.
ﻣﺒﺎﻧﻲ ﻣﻐﻨﺎﻃﻴﺲ
در اﻳﻦ ﻗﺴﻤﺖ ﺑﻪ ﻃﻮر ﺧﻼﺻﻪ ﭼﮕﻮﻧﮕﻲ ﺑﻪ وﺟﻮد آﻣﺪن ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ از ﺟﺮﻳﺎن اﻟﻜﺘﺮﻳﻜﻲ و ﺳﭙﺲ ﺑﻪ وﺟﻮد آﻣﺪن ﻧﻴﺮو از ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ ﺗﻮﺿﻴﺢ داده ﺷﺪه اﺳﺖ.
در ﺷﻜﻞ 2 وﺿﻌﻴﺖ ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ اﻃﺮاف ﻳﻚ ﺳﻴﻢ ﺣﺎﻣﻞ ﺟﺮﻳﺎن اﻟﻜﺘﺮﻳﻜﻲ ﻧﺸﺎن داده ﺷﺪه اﺳﺖ. i (آﻣﭙﺮ) ﺟﺮﻳﺎن اﻟﻜﺘﺮﻳﻜﻲ را ﻧﺸﺎن ﻣﻲ دﻫﺪ و H(A/m) ﺷﺪت ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ را ﻧﺸﺎن ﻣﻲ دﻫﺪ ﻛﻪ ﺟﻬﺖ آن ﺑﻪ وﺳﻴﻠﻪ ﻗﺎﻧﻮن دﺳﺖ راﺳﺖ ﻣﺸﺨﺺ ﻣﻲﮔﺮدد. در ﻣﺪارﻫﺎي ﻣﻐﻨﺎﻃﻴﺴﻲ ﻧﻴﺎز اﺳﺖ ﻛﻪ ﻣﺴﻴﺮ ﺧﻄﻮط ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ ﺑﻪ ﺻﻮرت ﻣﺴﺘﻘﻴﻢ ﺑﺎﺷﺪ، ﻟﺬا ﺳﻴﻢ ﺣﺎﻣﻞ ﺟﺮﻳﺎن ﭘﻴﭽﺎﻧﺪه ﺷﺪه و ﺑﻪ ﺻﻮرت ﺳﻴﻢﭘﻴﭻ در ﻣﻲآﻳﺪ ﻛﻪ در اﻳﻦ ﺣﺎﻟﺖ ﺧﻄﻮط ﻣﻴﺪان در ﻣﺮﻛﺰ ﺳﻴﻢﭘﻴﭻ ﻣﺴﺘﻘﻴﻢ ﺧﻮاﻫﻨﺪ ﺑﻮد (ﻣﻄﺎﺑﻖ ﺷﻜﻞ3).
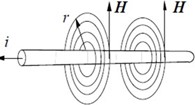
ﺷﻜﻞ –2 ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ اﻃﺮاف ﺳﻴﻢ ﺣﺎﻣﻞ ﺟﺮﻳﺎن اﻟﻜﺘﺮﻳﻜﻲ
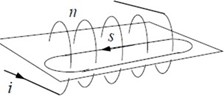
ﺷﻜﻞ –3 ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ در ﻣﺮﻛﺰ ﺳﻴﻢﭘﻴﭻ ﺣﺎﻣﻞ ﺟﺮﻳﺎن اﻟﻜﺘﺮﻳﻜﻲ
ﻫﻤﺎﻧﻄﻮر ﻛﻪ در ﻣﻌﺎدﻟﻪ (1) ﻧﺸﺎن داده ﺷﺪه اﺳﺖ، اﻧﺘﮕﺮال ﺳﻄﺤﻲ ﺷﺪت ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ ﺑﺎ ﺟﺮﻳﺎن ﺳﻴﻢ و ﺗﻌﺪاد دور ﺳﻴﻢﭘﻴﭻ ﻣﺘﻨﺎﺳﺐ اﺳﺖ و ﺷﺪت ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ ﻃﺒﻖ ﻣﻌﺎدﻟﻪ (2) ﺑﺎ ﭼﮕﺎﻟﻲ ﺷﺎر ﻣﻐﻨﺎﻃﻴﺴﻲ B(Tesla) ﻣﺮﺗﺒﻂ ﻣﻲﺷﻮد. ![]() در ﻣﻌﺎدﻟﻪ (2) ﺿﺮﻳﺐ ﻧﻔﻮذﭘﺬﻳﺮي ﺧﻼء در ﻣﻘﺎﺑﻞ ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ را ﻧﺸﺎن ﻣﻲدﻫﺪ و ﻣﻌﺎدل
در ﻣﻌﺎدﻟﻪ (2) ﺿﺮﻳﺐ ﻧﻔﻮذﭘﺬﻳﺮي ﺧﻼء در ﻣﻘﺎﺑﻞ ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ را ﻧﺸﺎن ﻣﻲدﻫﺪ و ﻣﻌﺎدل ![]() اﺳﺖ.
اﺳﺖ. ![]() ﻧﻴﺰ ﺿﺮﻳﺐ ﻧﻔﻮذﭘﺬﻳﺮي ﻣﻐﻨﺎﻃﻴﺴﻲ ﺳﺎﻳﺮ اﺟﺴﺎم ﻧﺴﺒﺖ ﺑﻪ ﺧﻼء ﻣﻲﺑﺎﺷﺪ و آن را ﺿﺮﻳﺐ ﻧﻔﻮذﭘﺬﻳﺮي ﻧﺴﺒﻲ ﻣﻲﻧﺎﻣﻨﺪ ﻛﻪ ﻣﻘﺪار ﺑﺮاي ﺧﻼء ﻋﺪد 1 اﺳﺖ.
ﻧﻴﺰ ﺿﺮﻳﺐ ﻧﻔﻮذﭘﺬﻳﺮي ﻣﻐﻨﺎﻃﻴﺴﻲ ﺳﺎﻳﺮ اﺟﺴﺎم ﻧﺴﺒﺖ ﺑﻪ ﺧﻼء ﻣﻲﺑﺎﺷﺪ و آن را ﺿﺮﻳﺐ ﻧﻔﻮذﭘﺬﻳﺮي ﻧﺴﺒﻲ ﻣﻲﻧﺎﻣﻨﺪ ﻛﻪ ﻣﻘﺪار ﺑﺮاي ﺧﻼء ﻋﺪد 1 اﺳﺖ.

ﺑﺎ اﺳﺘﻔﺎده از ﻣﻮاد ﻓﺮوﻣﻐﻨﺎﻃﻴﺲ ﻛﻪ ![]() در آﻧﻬﺎ ﺑﺴﻴﺎر ﺑﺰرﮔﺘﺮ از 1 اﺳﺖ، ﺧﻄﻮط ﻣﻴﺪان ﻣﻲﺗﻮاﻧﻨﺪ در ﻣﺮﻛﺰ ﻫﺴﺘﻪ ﻣﺘﻤﺮﻛﺰ ﺷﻮﻧﺪ.
در آﻧﻬﺎ ﺑﺴﻴﺎر ﺑﺰرﮔﺘﺮ از 1 اﺳﺖ، ﺧﻄﻮط ﻣﻴﺪان ﻣﻲﺗﻮاﻧﻨﺪ در ﻣﺮﻛﺰ ﻫﺴﺘﻪ ﻣﺘﻤﺮﻛﺰ ﺷﻮﻧﺪ.
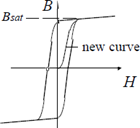
رﻓﺘﺎر اﻳﻦ ﻣﻮاد ﻣﻌﻤﻮﻻً ﺑﻪ ﺻﻮرت ﻧﻤﻮدار B‐H (ﺷﻜﻞ4) ﻧﺸﺎن داده ﻣﻲﺷﻮد. در اﻳﻦ ﻧﻤﻮدار ﭘﺪﻳﺪه ﻫﻴﺴﺘﺮزﻳﺲ و اﺷﺒﺎع ﻫﺴﺘﻪ ﻣﻐﻨﺎﻃﻴﺴﻲ ﻗﺎﺑﻞ ﻣﺸﺎﻫﺪه اﺳﺖ. در ﺣﺎﻟﺖ اﺷﺒﺎع، ﺑﺎ اﻓﺰاﻳﺶ ﺟﺮﻳﺎن اﻟﻜﺘﺮﻳﻜﻲ و در ﻧﺘﻴﺠﻪ آن ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ، ﭼﮕﺎﻟﻲ ﺷﺎر ﻣﻐﻨﺎﻃﻴﺴﻲ اﻓﺰاﻳﺶ ﻧﻤﻲ ﻳﺎﺑﺪ. ﺷﻜﻠﻬﺎي 5 و 6 ﻧﺸﺎن ﻣﻲدﻫﻨﺪ ﭼﮕﻮﻧﻪ ﻧﻴﺮو در ﺑﻴﺮﻳﻨﮓ ﻣﻐﻨﺎﻃﻴﺴﻲ ﺑﻪ وﺟﻮد ﻣﻲ آﻳﺪ.
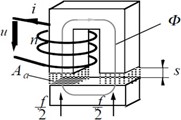
ﺷﻜﻞ -5 وﺿﻌﻴﺖ ﻧﻴﺮو در ﻳﻚ اﻟﻜﺘﺮوﻣﮕﻨﺖ
اﻳﻦ ﺷﻜﻠﻬﺎ ﻣﺴﻴﺮ ﺷﺎر ﻣﻐﻨﺎﻃﻴﺴﻲ ![]() را در ﻳﻚ اﻟﻜﺘﺮوﻣﮕﻨﺖ دوﻗﻄﺒﻲ را ﻧﺸﺎن ﻣﻲدﻫﻨﺪ ﻛﻪ ﺑﺨﺸﻲ از ﻳﻚ ﺑﻴﺮﻳﻨﮓ ﻣﻐﻨﺎﻃﻴﺴﻲ ﺷﻌﺎﻋﻲ اﺳﺖ. ﺑﺎ ﻓﺮض ﻫﻤﮕﻦ ﺑﻮدن ﺷﺎر درون ﻫﺴﺘﻪ و درون ﻓﺎﺻﻠﻪ ﻫﻮاﻳﻲ ( s) و ﻳﻜﺴﺎن ﺑﻮدن ﺳﻄﺢ ﻣﻘﻄﻊ ﻫﺴﺘﻪ و ﻓﺎﺻﻠﻪ ﻫﻮاﻳﻲ
را در ﻳﻚ اﻟﻜﺘﺮوﻣﮕﻨﺖ دوﻗﻄﺒﻲ را ﻧﺸﺎن ﻣﻲدﻫﻨﺪ ﻛﻪ ﺑﺨﺸﻲ از ﻳﻚ ﺑﻴﺮﻳﻨﮓ ﻣﻐﻨﺎﻃﻴﺴﻲ ﺷﻌﺎﻋﻲ اﺳﺖ. ﺑﺎ ﻓﺮض ﻫﻤﮕﻦ ﺑﻮدن ﺷﺎر درون ﻫﺴﺘﻪ و درون ﻓﺎﺻﻠﻪ ﻫﻮاﻳﻲ ( s) و ﻳﻜﺴﺎن ﺑﻮدن ﺳﻄﺢ ﻣﻘﻄﻊ ﻫﺴﺘﻪ و ﻓﺎﺻﻠﻪ ﻫﻮاﻳﻲ ![]() ، ﭼﮕﺎﻟﻲ ﺷﺎر ﻛﻠﻲ ﺑﺎ ﭼﮕﺎﻟﻲ ﺷﺎر ﻓﺎﺻﻠﻪ ﻫﻮاﻳﻲ ﻣﺴﺎوي اﺳﺖ
، ﭼﮕﺎﻟﻲ ﺷﺎر ﻛﻠﻲ ﺑﺎ ﭼﮕﺎﻟﻲ ﺷﺎر ﻓﺎﺻﻠﻪ ﻫﻮاﻳﻲ ﻣﺴﺎوي اﺳﺖ ![]() .ﻧﻴﺮوي ﺑﻪ وﺟﻮد آﻣﺪه را ﻣﻲﺗﻮان از ﻃﺮﻳﻖ ﻣﻌﺎدﻟﻪ اﻧﺮژي ذﺧﻴﺮه ﺷﺪه در ﻓﺎﺻﻠﻪ ﻫﻮاﻳﻲ
.ﻧﻴﺮوي ﺑﻪ وﺟﻮد آﻣﺪه را ﻣﻲﺗﻮان از ﻃﺮﻳﻖ ﻣﻌﺎدﻟﻪ اﻧﺮژي ذﺧﻴﺮه ﺷﺪه در ﻓﺎﺻﻠﻪ ﻫﻮاﻳﻲ![]() ﻣﺤﺎﺳﺒﻪ ﻛﺮد.
ﻣﺤﺎﺳﺒﻪ ﻛﺮد.

ﻧﻴﺮوﻳﻲ ﻛﻪ روي ﺷﻔﺖ اﻋﻤﺎل ﻣﻲﺷﻮد از ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ درون ﻓﺎﺻﻠﻪ ﻫﻮاﻳﻲ ﺑﻪ وﺟﻮد ﻣﻲآﻳﺪ. ﺑﺮاي ﺟﺎﺑﺠﺎﻳﻲﻫﺎي ﻛﻮﭼﻚ(ds)، ﺷﺎر ﻣﻐﻨﺎﻃﻴﺴﻲ![]() ﺛﺎﺑﺖ اﺳﺖ. وﻗﺘﻲ ﻃﻮل ﻓﺎﺻﻠﻪ ﻫﻮاﻳﻲ اﻓﺰاﻳﺶ ﻣﻲﻳﺎﺑﺪ، ﺣﺠﻢ ﻓﺎﺻﻠﻪ ﻫﻮاﻳﻲ
ﺛﺎﺑﺖ اﺳﺖ. وﻗﺘﻲ ﻃﻮل ﻓﺎﺻﻠﻪ ﻫﻮاﻳﻲ اﻓﺰاﻳﺶ ﻣﻲﻳﺎﺑﺪ، ﺣﺠﻢ ﻓﺎﺻﻠﻪ ﻫﻮاﻳﻲ![]() ﻧﻴﺰ اﻓﺰاﻳﺶ ﻣﻲﻳﺎﺑﺪ و ﺗﻐﻴﻴﺮات
ﻧﻴﺰ اﻓﺰاﻳﺶ ﻣﻲﻳﺎﺑﺪ و ﺗﻐﻴﻴﺮات ![]() ﻫﻢ dW ﻧﺸﺎن داده ﻣﻲﺷﻮد، ﭘﺲ ﻣﻲﺗﻮان ﻣﻌﺎدﻟﻪ آن را ﺑﻪ ﺻﻮرت زﻳﺮ ﺑﻴﺎن ﻛﺮد:
ﻫﻢ dW ﻧﺸﺎن داده ﻣﻲﺷﻮد، ﭘﺲ ﻣﻲﺗﻮان ﻣﻌﺎدﻟﻪ آن را ﺑﻪ ﺻﻮرت زﻳﺮ ﺑﻴﺎن ﻛﺮد:

ﺧﺎرج از ﻣﺤﺪوده اﺷﺒﺎع ﻫﺴﺘﻪ، ﻧﻴﺮوي ﺑﻪ وﺟﻮد آﻣﺪه ﺗﺎﺑﻌﻲ از ﺟﺮﻳﺎن ﺳﻴﻢﭘﻴﭻ و ﻓﺎﺻﻠﻪ ﻫﻮاﻳﻲ ﻣﻲﺑﺎﺷﺪ ﻛﻪ ﻣﻌﺎدﻟﻪ آن ﺑﻪ ﺻﻮرت زﻳﺮ اﺳﺖ (ﻣﻌﺎدﻟﻪ 5):

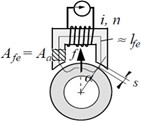
در ﻣﻌﺎدﻟﻪ (5) ﻧﺸﺎن داده ﺷﺪ ﻛﻪ ﻧﻴﺮوي ﺑﻪ وﺟﻮد آﻣﺪه ﺑﺎ ﻣﺠﺬور ﺟﺮﻳﺎن راﺑﻄﻪ ﻣﺴﺘﻘﻴﻢ و ﺑﺎ ﻣﺠﺬور ﻓﺎﺻﻠﻪ ﻫﻮاﻳﻲ راﺑﻄﻪ ﻋﻜﺲ دارد. ﺑﺮاي ﻳﻚ ﺑﻴﺮﻳﻨﮓ ﻣﺤﻮري واﻗﻌﻲ، ﻧﻴﺮوي ﺣﺎﺻﻞ از ﻗﻄﺒﻬﺎي ﻣﻐﻨﺎﻃﻴﺴﻲ ﻧﻪ ﺑﻪ ﺻﻮرت ﻣﺴﺘﻘﻴﻢ ﻛﻪ ﺑﺎ زاوﻳﻪاي ﻣﺸﺨﺺ( ) رويروﺗﻮر اﺛﺮ ﻣﻲﮔﺬارﻧﺪ(ﺷﻜﻞ5). ﺑﺮاي ﻳﻚ ﺑﻴﺮﻳﻨﮓ ﻣﺤﻮري ﺑﺎ ﭼﻬﺎر اﻟﻜﺘﺮو ﻣﮕﻨﺖ اﻳﻦ زاوﻳﻪ ﻣﻌﺎدل ![]() اﺳﺖ. ﺣﺎل ﺑﺎدر ﻧﻈﺮ ﮔﺮﻓﺘﻦ اﺛﺮ اﻳﻦ زاوﻳﻪ ﻣﻌﺎدﻟﻪ (5) ﺑﻪ ﺷﻜﻞ زﻳﺮ در ﻣﻲ آﻳﺪ:
اﺳﺖ. ﺣﺎل ﺑﺎدر ﻧﻈﺮ ﮔﺮﻓﺘﻦ اﺛﺮ اﻳﻦ زاوﻳﻪ ﻣﻌﺎدﻟﻪ (5) ﺑﻪ ﺷﻜﻞ زﻳﺮ در ﻣﻲ آﻳﺪ:

ﺑﻴﺮﻳﻨﮕﻬﺎي ﺷﻌﺎﻋﻲ و ﻣﺤﻮري در ﻋﻤﻞ
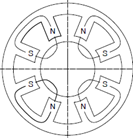
در ﺑﻴﺮﻳﻨﮕﻬﺎي ﺷﻌﺎﻋﻲ ﺧﻄﻮط ﻣﻴﺪان ﻃﺒﻖ اﺻﻮﻟﻲ ﻛﻪ در ﺑﺨﺶ ﻗﺒﻞ ﺗﻮﺿﻴﺢ داده ﺷﺪ ﻧﻴﺮوي ﻣﻐﻨﺎﻃﻴﺴﻲ از 4 ﺟﻬﺖ ﺑﻪ ﺷﻔﺖ اﻋﻤﺎل ﻣﻲﺷﻮد و ﺷﻔﺖ را در وﺳﻂ ﻓﻀﺎي ﭼﺮﺧﺶ ﺛﺎﺑﺖ ﻧﮕﻪ ﻣﻲدارد (ﺷﻜﻞ 7 و 8) در ﺑﻴﺮﻳﻨﮕﻬﺎي ﻣﺤﻮري اﺻﻮل اﻳﺠﺎد ﻧﻴﺮو ﻧﻴﺰ ﻳﻜﺴﺎن اﺳﺖ ﺑﺎ اﻳﻦ ﺗﻔﺎوت ﻛﻪ ﻧﻴﺮوي ﻣﻐﻨﺎﻃﻴﺴﻲ ﺑﺎ ﺑﺴﺘﻪ ﺷﺪن ﺧﻄﻮط ﻣﻴﺪان داﺧﻞ ﻳﻚ دﻳﺴﻚ ﻛﻪ روي ﺷﻔﺖ ﻧﺼﺐ ﻣﻲﺷﻮد، اﻋﻤﺎل ﻣﻲﮔﺮدد. اﻳﻦ ﻧﻴﺮو ﺗﻮﺳﻂ دو اﻟﻜﺘﺮو ﻣﮕﻨﺖ ﻣﺤﻮري ﻛﻪ در دو ﺳﻤﺖ اﻳﻦ دﻳﺴﻚ ﻗﺮار دارﻧﺪ اﻳﺠﺎد ﻣﻲﺷﻮﻧﺪ ﻛﻪ ﺑﺎ اﻋﻤﺎل ﺟﺮﻳﺎن اﻟﻜﺘﺮﻳﻜﻲ ﺑﻪ ﻫﺮ ﻛﺪام از آﻧﻬﺎ، دﻳﺴﻚ را ﺑﻪ ﺳﻤﺖ ﺧﻮد ﻣﻲرﺑﺎﻳﻨﺪ(ﺷﻜﻞ9 و 10) ﺑﺎ ﺗﻨﻈﻴﻢ ﺟﺮﻳﺎن اﻟﻜﺘﺮﻳﻜﻲ ﻣﻨﺎﺳﺐ ﺗﻮﺳﻂ ﻛﻨﺘﺮﻟﺮ، دﻳﺴﻚ در ﻣﺮﻛﺰ ﻓﻀﺎي ﭼﺮﺧﺶ ﺑﻴﻦ دو اﻟﻜﺘﺮوﻣﮕﻨﺖ ﺑﺎﻗﻲ ﻣﻲﻣﺎﻧﺪ.


ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل
ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل در ﺑﻴﺮﻳﻨﮓ ﻣﻐﻨﺎﻃﻴﺴﻲ ﺟﺮﻳﺎن اﻟﻜﺘﺮﻳﻜﻲ اﻋﻤﺎل ﺷﺪه ﺑﻪ اﻟﻜﺘﺮوﻣﮕﻨﺘﻬﺎ را ﺗﻨﻈﻴﻢ ﻣﻲﻛﻨﺪ. ﺟﺮﻳﺎن اﻟﻜﺘﺮﻳﻜﻲ ﺑﺎ اﺟﺮاي اﻟﮕﻮرﻳﺘﻢ PID ﻛﻨﺘﺮل ﻣﻲﺷﻮد. ﻃﺒﻖ ﻣﻌﺎدﻟﻪ (7)، ﻛﻨﺘﺮل ﻛﻨﻨﺪه PID1 ﻳﻚ ﻛﻨﺘﺮل ﻛﻨﻨﺪه ﺣﻠﻘﻪ ﺑﺴﺘﻪ اﺳﺖ ﻛﻪ ﺑﺎ ﻓﻴﺪﺑﻚ ﮔﺮﻓﺘﻦ از ﺷﺮاﻳﻂ واﻗﻌﻲ ﭘﺮوﺳﻪ ﺗﻮﺳﻂ ﻳﻚ ﺳﻨﺴﻮر و ﻣﻘﺎﻳﺴﻪ آن ﺑﺎ ﺷﺮاﻳﻂ اﻳﺪه آل، ﻣﻴﺰان ﺧﻄﺎي ﺳﻴﺴﺘﻢ را ﻣﺤﺎﺳﺒﻪ ﻛﺮده و ﻋﻤﻠﮕﺮﻫﺎي ﺗﻨﺎﺳﺒﻲ (P)، اﻧﺘﮕﺮال ﮔﻴﺮ (I) و ﻣﺸﺘﻖ ﮔﻴﺮ (D) را ﺑﻪ ﻣﻴﺰان ﺧﻄﺎ اﻋﻤﺎل ﻣﻲﻛﻨﺪ. در ﻧﻬﺎﻳﺖ ﺑﺎ ﺟﻤﻊ ﻛﺮدن اﻳﻦ ﺳﻪ ﻋﻤﻠﮕﺮ ﺧﺮوﺟﻲ ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل ﺑﻪ دﺳﺖ ﻣﻲ آﻳﺪ ﻛﻪ ﻫﺪف آن ﺑﻪ ﺻﻔﺮ رﺳﺎﻧﺪن ﺧﻄﺎ و رﺳﺎﻧﺪن ﭘﺮوﺳﻪ ﺑﻪ ﺷﺮاﻳﻂ اﻳﺪه آل اﺳﺖ. در اﻳﻨﺠﺎ e(t) ﻣﻴﺰان ﺧﻄﺎ و i(t) ﺟﺮﻳﺎن ﺧﺮوﺟﻲ ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل اﺳﺖ ﻛﻪ ﺑﺮاي ﻳﻚ ﺑﻴﺮﻳﻨﮓ ﻣﻐﻨﺎﻃﻴﺴﻲ ﺷﺮاﻳﻂ اﻳﺪه آل، ﻧﮕﻪ داﺷﺘﻦ ﺷﻔﺖ در ﻣﺮﻛﺰ ﻓﻀﺎي ﭼﺮﺧﺶ ﻣﻲ ﺑﺎﺷﺪ. اﺟﺮاي اﻳﻦ اﻟﮕﻮرﻳﺘﻢ در ﻋﻤﻞ ﺑﺎﻳﺪ ﺑﺎ ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل ﺑﺪون وﻗﻔﻪ (REAL TIME) زﻳﺮا ﺑﻪ ﻋﻠﺖ ﻛﻮﭼﻚ ﺑﻮدن ﻓﺎﺻﻠﻪ ﻫﻮاﻳﻲ ﺑﻴﻦ اﻟﻜﺘﺮو ﻣﮕﻨﺘﻬﺎ و ﺷﻔﺖ (ﺣﺪوداً 0/6 ﻣﻴﻠﻴﻤﺘﺮ)، در ﺻﻮرت ﺧﺎرج ﺷﺪن ﺷﻔﺖ از ﻣﻮﻗﻌﻴﺖ ﺧﻮد ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل ﻓﺮﺻﺖ ﺑﺴﻴﺎر ﻛﻤﻲ ﺑﺮاي ﺗﺼﺤﻴﺢ ﺟﺮﻳﺎن اﻟﻜﺘﺮﻳﻜﻲ دارد. ﺑﺮاي اﻳﻦ ﻣﻨﻈﻮر ﻧﻴﺎز اﺳﺖ از ﭘﺮدازﺷﮕﺮﻫﺎي ﭘﺮﺳﺮﻋﺖ ﻣﺎﻧﻨﺪ DSP2 اﺳﺘﻔﺎده ﻛﺮد.

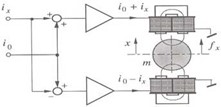
ﺳﻴﮕﻨﺎل ﺧﺮوﺟﻲ ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل از ﻧﻮع 3PWM ﻣﻲ ﺑﺎﺷﺪ ﻛﻪ ﺑﻪ ﺻﻮرت ﺳﻮﺋﻴﭽﻴﻨﮓ ﺳﻴﮕﻨﺎل ﺧﺮوﺟﻲ را ﺗﻮﻟﻴﺪ ﻣﻲﺑﺎﺷﺪ و ﻣﻴﺰان DUTY CYCLE ﺑﺮاي PWM را ﻛﻨﺘﺮل ﻛﻨﻨﺪه PID ﺗﻌﻴﻴﻦ ﻣﻲﺑﺎﺷﺪ. از آﻧﺠﺎ ﻛﻪ ﺧﺮوﺟﻲ ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل ﺟﺮﺑﺎن ﺑﺴﻴﺎر ﭘﺎﺋﻴﻨﻲ دارد ﻧﻤﻲﺗﻮاﻧﺪ ﺗﻮان ﻻزم ﺑﺮاي ﻛﺎر اﻟﻜﺘﺮوﻣﮕﻨﺘﻬﺎ را ﺗﺄﻣﻴﻦ ﻛﻨﺪ در ﻧﺘﻴﺠﻪ ﻻزم اﺳﺖ ﺳﻴﮕﻨﺎل ﺧﺮوﺟﻲ ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل ﺑﺎ ﻳﻚ ﻧﺴﺒﺖ ﻣﺸﺨﺺ اﻓﺰاﻳﺶ ﻳﺎﺑﺪ. ﻛﻪ اﻳﻦ ﻛﺎر ﺗﻮﺳﻂ ﺗﻘﻮﻳﺖﻛﻨﻨﺪهﻫﺎي ﻗﺪرت اﻧﺠﺎم ﻣﻲﺷﻮد. ﻣﻌﻤﻮﻻً ﺑﺮاي ﺳﺎدهﺗﺮ ﻛﺮدن ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل در ﺑﻴﺮﻳﻨﮕﻬﺎي ﻣﻐﻨﺎﻃﻴﺴﻲ از روش ﺗﻔﺎﺿﻠﻲ(DIFFERENTIAL) اﺳﺘﻔﺎده ﻣﻲﺷﻮد. در اﻳﻦ روش ﻣﻲ ﺗﻮان ﺑﺎ ﻳﻚ ﺳﻴﮕﻨﺎل ﻛﻨﺘﺮل، دو ﺗﻘﻮﻳﺖ ﻛﻨﻨﺪه ﻣﺮﺑﻮط ﺑﻪ اﻟﻜﺘﺮوﻣﮕﻨﺘﻬﺎﻳﻲ ﻛﻪ ﻗﺮﻳﻨﻪ ﻫﻢ ﻫﺴﺘﻨﺪ را راه اﻧﺪازي ﻛﺮد (ﺷﻜﻞ11) در اﻳﻦ روش از ﻳﻚ ﺳﻴﮕﻨﺎل ﺛﺎﺑﺖ( i0 ) و ﻳﻚ ﺳﻴﮕﻨﺎل ﻛﻨﺘﺮل ![]() اﺳﺘﻔﺎده ﺷﺪه اﺳﺖ ﻛﻪ ﺑﺎ ﺗﻐﻴﻴﺮ ﺳﻴﮕﻨﺎل ﻛﻨﺘﺮل، ﻧﻴﺮوي ﺑﺮاﻳﻨﺪ ﻫﺮ دو اﻟﻜﺘﺮوﻣﮕﻨﺖ ﺗﻐﻴﻴﺮ ﻣﻲﺑﺎﺷﺪ.
اﺳﺘﻔﺎده ﺷﺪه اﺳﺖ ﻛﻪ ﺑﺎ ﺗﻐﻴﻴﺮ ﺳﻴﮕﻨﺎل ﻛﻨﺘﺮل، ﻧﻴﺮوي ﺑﺮاﻳﻨﺪ ﻫﺮ دو اﻟﻜﺘﺮوﻣﮕﻨﺖ ﺗﻐﻴﻴﺮ ﻣﻲﺑﺎﺷﺪ.
ﺳﻨﺴﻮر ﻣﻮﻗﻌﻴﺖ
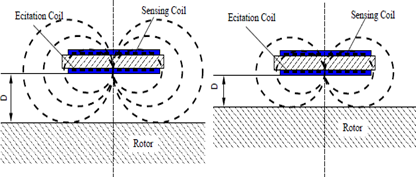
اﻳﻦ ﺳﻨﺴﻮرﻫﺎ ﻣﻮﻗﻌﻴﺖ ﺳﻪ ﺑﻌﺪي ﺷﻔﺖ را ﺑﺮاي ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل روﺷﻦ ﻣﻲﻛﻨﻨﺪ. ﺑﻪ دﻟﻴﻞ ﻛﻮﭼﻚ ﺑﻮدن ﻓﺎﺻﻠﻪاي ﻛﻪ ﺑﺎﻳﺪ اﻧﺪازهﮔﻴﺮي ﺷﻮد و ﻧﻴﺎز ﺑﻪ دﻗﺖ ﺑﺎﻻ ﺗﻨﻬﺎ ﺳﻨﺴﻮرﻫﺎي ﺧﺎﺻﻲ ﻫﺴﺘﻨﺪ ﻛﻪ اﻳﻦ ﻗﺎﺑﻠﻴﺖ را دارﻧﺪ. اﻳﻦ ﺳﻨﺴﻮرﻫﺎ از ﻧﻮع ﺟﺮﻳﺎن ﮔﺮداﺑﻲ(CURRENT EDDY) ﻣﻲ ﺑﺎﺷﻨﺪ ﻛﻪ دﻗﺘﻲ در ﺣﺪود ﻣﻴﻜﺮون ![]() اراﺋﻪ ﻣﻲ دﻫﻨﺪ. ﺑﻪ ﻃﻮر ﻛﻠﻲ در اﻳﻦ ﺳﻨﺴﻮرﻫﺎ دو ﺳﻴﻢ ﭘﻴﭻ وﺟﻮد دارد ﻛﻪ ﻳﻜﻲ از آﻧﻬﺎ ﺳﻴﻢ ﭘﻴﭻ ﺗﺤﺮﻳﻚ (EXITATION COIL) و دﻳﮕﺮي ﺳﻴﻢ ﭘﻴﭻ (SENSING COIL) ﺣﺴﮕﺮ ﻣﻲﺑﺎﺷﺪ. ﺑﺎ اﻋﻤﺎل وﻟﺘﺎژ ﺑﻪ ﺳﻴﻢﭘﻴﭻ ﺗﺤﺮﻳﻚ ﻳﻚ ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ اﻳﺠﺎد ﻣﻲﺷﻮد ﻛﻪ ﺑﺎ ﺗﻮﻟﻴﺪ ﺟﺮﻳﺎن ﮔﺮداﺑﻲ روي ﺳﻄﺢ ﻫﺪف (ﺷﻔﺖ) ﻣﻲﮔﺮدد. اﻳﻦ ﺟﺮﻳﺎن ﮔﺮداﺑﻲ ﻧﻴﺰ ﺑﺎﻋﺚ اﻟﻘﺎء وﻟﺘﺎژ روي ﺳﻴﻢﭘﻴﭻ ﺳﻨﺴﻮر ﻣﻲﮔﺮدد (ﺷﻜﻞ 12). اﻳﻦ وﻟﺘﺎژ ﺑﺎ ﺗﻐﻴﻴﺮات ﻓﺎﺻﻠﻪ ﺑﻴﻦ ﺳﻨﺴﻮر و ﻫﺪف (D) ﺑﻪ ﺻﻮرت ﻏﻴﺮﺧﻄﻲ ﺗﻐﻴﻴﺮ ﻣﻲﻛﻨﺪ ﻛﻪ ﺑﺮاي ﺧﻄﻲ ﻛﺮدن آن ﻣﻲ ﺗﻮان از ﻳﻚ ﭘﺮدازش ﻛﻨﻨﺪه ﺳﻴﮕﻨﺎل اﺳﺘﻔﺎده ﻛﺮد ﺗﺎ ﺑﺘﻮان از ﺳﻴﮕﻨﺎل ﺧﺮوﺟﻲ ﺳﻨﺴﻮر در ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل اﺳﺘﻔﺎده ﻛﺮد. اﻳﻦ ﺳﻨﺴﻮرﻫﺎ ﺑﺎ دﻗﺖ و ﻓﺮﻛﺎﻧﺲ ﻛﺎري ﻣﺨﺘﻠﻒ ﺳﺎﺧﺘﻪ ﻣﻲ ﺷﻮﻧﺪ. ﻣﻨﻈﻮر از ﻓﺮﻛﺎﻧﺲ ﻛﺎري اﻳﻦ اﺳﺖ ﻛﻪ اﮔﺮ ﺳﻄﺢ ﻫﺪف دﭼﺎر ﻧﻮﺳﺎن ﺷﻮد و ﻓﺮﻛﺎﻧﺲ ﻧﻮﺳﺎن از ﺣﺪ ﺗﻌﻴﻴﻦ ﺷﺪه ﺑﺮاي ﺳﻨﺴﻮر ﺑﮕﺬرد، ﺳﻨﺴﻮر دﻳﮕﺮ دﻗﺘﻲ را ﻛﻪ ﺑﺮاي آن اﻋﻼم ﺷﺪه ﻧﺨﻮاﻫﺪ داﺷﺖ.
اراﺋﻪ ﻣﻲ دﻫﻨﺪ. ﺑﻪ ﻃﻮر ﻛﻠﻲ در اﻳﻦ ﺳﻨﺴﻮرﻫﺎ دو ﺳﻴﻢ ﭘﻴﭻ وﺟﻮد دارد ﻛﻪ ﻳﻜﻲ از آﻧﻬﺎ ﺳﻴﻢ ﭘﻴﭻ ﺗﺤﺮﻳﻚ (EXITATION COIL) و دﻳﮕﺮي ﺳﻴﻢ ﭘﻴﭻ (SENSING COIL) ﺣﺴﮕﺮ ﻣﻲﺑﺎﺷﺪ. ﺑﺎ اﻋﻤﺎل وﻟﺘﺎژ ﺑﻪ ﺳﻴﻢﭘﻴﭻ ﺗﺤﺮﻳﻚ ﻳﻚ ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ اﻳﺠﺎد ﻣﻲﺷﻮد ﻛﻪ ﺑﺎ ﺗﻮﻟﻴﺪ ﺟﺮﻳﺎن ﮔﺮداﺑﻲ روي ﺳﻄﺢ ﻫﺪف (ﺷﻔﺖ) ﻣﻲﮔﺮدد. اﻳﻦ ﺟﺮﻳﺎن ﮔﺮداﺑﻲ ﻧﻴﺰ ﺑﺎﻋﺚ اﻟﻘﺎء وﻟﺘﺎژ روي ﺳﻴﻢﭘﻴﭻ ﺳﻨﺴﻮر ﻣﻲﮔﺮدد (ﺷﻜﻞ 12). اﻳﻦ وﻟﺘﺎژ ﺑﺎ ﺗﻐﻴﻴﺮات ﻓﺎﺻﻠﻪ ﺑﻴﻦ ﺳﻨﺴﻮر و ﻫﺪف (D) ﺑﻪ ﺻﻮرت ﻏﻴﺮﺧﻄﻲ ﺗﻐﻴﻴﺮ ﻣﻲﻛﻨﺪ ﻛﻪ ﺑﺮاي ﺧﻄﻲ ﻛﺮدن آن ﻣﻲ ﺗﻮان از ﻳﻚ ﭘﺮدازش ﻛﻨﻨﺪه ﺳﻴﮕﻨﺎل اﺳﺘﻔﺎده ﻛﺮد ﺗﺎ ﺑﺘﻮان از ﺳﻴﮕﻨﺎل ﺧﺮوﺟﻲ ﺳﻨﺴﻮر در ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل اﺳﺘﻔﺎده ﻛﺮد. اﻳﻦ ﺳﻨﺴﻮرﻫﺎ ﺑﺎ دﻗﺖ و ﻓﺮﻛﺎﻧﺲ ﻛﺎري ﻣﺨﺘﻠﻒ ﺳﺎﺧﺘﻪ ﻣﻲ ﺷﻮﻧﺪ. ﻣﻨﻈﻮر از ﻓﺮﻛﺎﻧﺲ ﻛﺎري اﻳﻦ اﺳﺖ ﻛﻪ اﮔﺮ ﺳﻄﺢ ﻫﺪف دﭼﺎر ﻧﻮﺳﺎن ﺷﻮد و ﻓﺮﻛﺎﻧﺲ ﻧﻮﺳﺎن از ﺣﺪ ﺗﻌﻴﻴﻦ ﺷﺪه ﺑﺮاي ﺳﻨﺴﻮر ﺑﮕﺬرد، ﺳﻨﺴﻮر دﻳﮕﺮ دﻗﺘﻲ را ﻛﻪ ﺑﺮاي آن اﻋﻼم ﺷﺪه ﻧﺨﻮاﻫﺪ داﺷﺖ.
ﻧﺘﻴﺠﻪ ﮔﻴﺮي
ﺑﺎ ﺗﻮﺟﻪ ﺑﻪ ﻣﻄﺎﻟﺐ ﺑﻴﺎن ﺷﺪه و ﺗﺠﺎرب اﺳﺘﻔﺎده از ﺑﻴﺮﻳﻨﮓ ﻣﻐﻨﺎﻃﻴﺴﻲ در ﭘﺮوژه ﻫﺎي ﻣﺨﺘﻠﻒ، ﻧﺼﺐ ﺑﻴﺮﻳﻨﮓ ﻣﻐﻨﺎﻃﻴﺴﻲ روي ﺗﺠﻬﻴﺰات دوار ﻣﻲ ﺗﻮاﻧﺪ ﺗﺄﺛﻴﺮ زﻳﺎدي در اﻓﺰاﻳﺶ ﻛﺎراﻳﻲ آﻧﻬﺎ داﺷﺘﻪ ﺑﺎﺷﺪ. ﺑﻪ ﺧﺼﻮص در ﺻﻨﺎﻳﻊ ﻧﻔﺖ و ﮔﺎز ﻛﻪ ﺗﺠﻬﻴﺰات دوار ﻧﻈﻴﺮ ﺗﻮرﺑﻮ ژﻧﺮاﺗﻮرﻫﺎ، ﺗﻮرﺑﻮ اﻛﺴﭙﺎﻧﺪرﻫﺎ، ﺗﻮرﺑﻮ ﻛﻤﭙﺮﺳﻮرﻫﺎ و اﻟﻜﺘﺮو ﻣﻮﺗﻮرﻫﺎي ﭘﺮ ﻗﺪرت اﺳﺘﻔﺎده ﻣﻲ ﺷﻮﻧﺪ، اﻳﻦ ﺗﻜﻨﻮﻟﻮژي ﻣﻲ ﺗﻮاﻧﺪ ﺑﺎﻋﺚ ﻛﺎﻫﺶ ﺣﺪاﻗﻞ 40 درﺻﺪي ﻣﺼﺮف اﻧﺮژي ﺷﻮد. ﻋﻠﺖ اﺻﻠﻲ ﺑﻪ وﺟﻮد آﻣﺪن ﺳﺮ و ﺻﺪا در ﺗﺠﻬﻴﺰات دوار، ﺑﻴﺮﻳﻨﮓ ﻣﻜﺎﻧﻴﻜﻲ آﻧﻬﺎ و ﻟﺮزش ﻫﺎي ﻧﺎﺷﻲ از ﺧﺮاﺑﻲ اﻳﻦ ﺑﻴﺮﻳﻨﮕﻬﺎ اﺳﺖ. ﺑﺎ ﺟﺎﻳﮕﺰﻳﻦ ﻛﺮدن ﺑﻴﺮﻳﻨﮕﻬﺎي ﻣﻜﺎﻧﻴﻜﻲ ﺑﺎ ﺑﻴﺮﻳﻨﮓ ﻣﻐﻨﺎﻃﻴﺴﻲ ﺑﻪ ﻋﻠﺖ ﻋﺪم ﺗﻤﺎس ﺑﺨﺶ ﺛﺎﺑﺖ و دوار و ﻗﺎﺑﻠﻴﺖ ﻛﻨﺘﺮل ﻟﺮزش ﺑﺎ ﺗﻨﻈﻴﻢ درﺳﺖ ﭘﺎراﻣﺘﺮﻫﺎي ﺳﻴﺴﺘﻢ ﻛﻨﺘﺮل ﻣﻲ ﺗﻮان ﺳﺮوﺻﺪا را ﺑﻪ ﺣﺪاﻗﻞ رﺳﺎﻧﺪ.
در اﻳﻦ ﺑﻴﺮﻳﻨﮕﻬﺎ ﺳﻴﺴﺘﻢ روﻏﻦ ﻛﺎري ﺣﺬف ﻣﻲ ﮔﺮدد ﻛﻪ اﻳﻦ ﺧﻮد ﻣﺰﻳﺖ ﺑﺰرﮔﻲ را ﻧﺴﺒﺖ ﺑﻴﺮﻳﻨﮕﻬﺎي ﻣﻜﺎﻧﻴﻜﻲ و ﻫﻴﺪروﻟﻴﻜﻲ اﻳﺠﺎد ﻣﻲ ﻛﻨﺪ. در ﺑﻴﺮﻳﻨﮕﻬﺎ ﻣﻜﺎﻧﻴﻜﻲ ﭘﻤﭙﻬﺎي ﺑﺰرگ ﺑﺰرگ ﻣﺜﻞ ﭘﻤﭙﻬﺎي ﺻﺎدرات ﻧﻔﺖ ﻧﻴﺎز اﺳﺖ ﻳﻚ ﻣﺴﻴﺮ ﺑﺮاي ﮔﺮدش و ﺧﻨﻚ ﻛﺎري روﻏﻦ ﺑﺎ اﺳﺘﻔﺎده از ﭘﻤﭗ روﻏﻦ و ﻳﻚ رادﻳﺎﺗﻮر ﺑﺮاي ﺧﻨﻚ ﻛﺎري ﻧﺼﺐ ﺷﻮد. اﻳﻦ ﻣﺴﻴﺮ ﻧﻴﺎز ﺑﻪ ﺗﻌﻤﻴﺮات را اﺿﺎﻓﻪ ﻛﺮده واﻃﻤﻴﻨﺎن ﭘﺬﻳﺮي ﺳﻴﺴﺘﻢ را ﭘﺎﻳﻴﻦ ﻣﻲ آورد ﺑﻪ اﻳﻦ ﺻﻮرت ﻛﻪ اﮔﺮ ﭘﻤﭗ روﻏﻦ از ﻛﺎر ﺑﻴﺎﻓﺘﺪ ﻳﺎ رادﻳﺎﺗﻮر ﺳﻮراخ ﺷﻮد، ﭘﻤﭗ ﺻﺎدرات ﻧﻔﺖ از ﺳﺮوﻳﺲ ﺧﺎرج ﻣﻲ ﮔﺮدد. ﺑﺮاي ﺑﻴﺮﻳﻨﮕﻬﺎ ﻫﻴﺪروﻟﻴﻚ ﻧﻴﺰ ﺑﻪ دﻟﻴﻞ ﺑﺎﻻ ﺑﻮدن ﻓﺸﺎر روﻏﻦ، ﭘﻤﭗ روﻏﻦ ﻗﻮي ﺗﺮ و ﺧﻨﻚ ﻛﺎري ﺳﺮﻳﻌﺘﺮ ﻧﻴﺎز اﺳﺖ ﻛﻪ در ﺑﻴﺮﻳﻨﮓ ﻣﻐﻨﺎﻃﻴﺴﻲ ﺑﻪ ﻫﻴﭽﻜﺪام ﻧﻴﺎزي ﻧﻴﺴﺖ.
ﻳﻜﻲ از ﻣﻬﻤﺘﺮﻳﻦ ﻗﺎﺑﻠﻴﺘﻬﺎي ﺑﻴﺮﻳﻨﮕﻬﺎي ﻣﻐﻨﺎﻃﻴﺴﻲ ﻗﺎﺑﻠﻴﺖ ﻛﺎر در ﺳﺮﻋﺘﻬﺎي ﺑﺴﻴﺎر ﺑﺎﻻ اﺳﺖ. ﻣﻬﻤﺮﻳﻦ ﻋﺎﻣﻞ ﻣﺤﺪود ﻛﻨﻨﺪه ﺳﺮﻋﺖ در ﺑﻴﺮﻳﻨﮕﻬﺎي ﻣﻜﺎﻧﻴﻜﻲ اﺻﻄﻜﺎك اﺳﺖ ﻛﻪ ﺳﺮﻋﺖ ﭼﺮﺧﺶ در اﻳﻦ ﺑﻴﺮﻳﻨﮕﻬﺎ را ﺗﺎ 3000 درو ﺑﺮ دﻗﻴﻘﻪ ﻣﺤﺪود ﻛﺮده اﺳﺖ. ﺑﻪ ﻋﻠﺖ ﺣﺬف اﺻﻄﻜﺎك در ﺑﻴﺮﻳﻨﮕﻬﺎي ﻣﻐﻨﺎﻃﻴﺴﻲ ﻣﻲ ﺗﻮان ﺳﺮﻋﺖ را ﺑﺴﻴﺎر ﺑﺎﻻﺗﺮ ﻳﻌﻨﻲ در ﺣﺪود 50000 دور ﺑﺮ دﻗﻴﻘﻪ رﺳﺎﻧﺪ ﻛﻪ ﻣﻴﺰان دﻗﻴﻖ آن ﺑﺴﺘﮕﻲ ﺑﻪ وﺿﻌﻴﺖ اﻳﺮودﻳﻨﺎﻣﻴﻚ روﺗﻮر و ﺗﻮاﻧﺎﻳﻲ ﺗﺤﻤﻞ ﻧﻴﺮوي ﮔﺮﻳﺰ از ﻣﺮﻛﺰ اﺟﺰاء آن دارد. اﻳﻦ ﻗﺎﺑﻠﻴﺖ ﺑﺎﻋﺚ ﻣﻲ ﺷﻮد ﺑﻴﺮﻳﻨﮓ ﻣﻐﻨﺎﻃﻴﺴﻲ ﮔﺰﻳﻨﻪ ﻣﻨﺎﺳﺒﻲ ﺑﺮاي اﺳﺘﻔﺎده در ﺗﺠﻬﻴﺰات دوار ﭘﺮ ﺳﺮﻋﺖ ﻣﺜﻞ ﺗﻮرﺑﻴﻨﻬﺎ ﺑﺎﺷﺪ.
ﺑﻴﺮﻳﻨﮕﻬﺎي ﻣﻐﻨﺎﻃﻴﺴﻲ ﻓﻌﺎل ﻳﻚ ﻗﺎﺑﻠﻴﺖ ﻣﻨﺤﺼﺮ ﺑﻪ ﻓﺮد دارﻧﺪ ﻛﻪ ﻧﺘﻈﻴﻢ ﭘﺎراﻣﺘﺮﻫﺎي ﻓﻨﺮﻳﺖ (Stiffness) و ﻣﻴﺮاﻳﻲ (Damping) اﺳﺖ. اﻳﻦ ﭘﺎراﻣﺘﺮﻫﺎ در ﺑﻴﺮﻳﻨﮕﻬﺎي ﻣﻜﺎﻧﻴﻜﻲ ﺑﺴﺘﻪ ﺑﻪ ﻧﻮع ﻣﺘﺮﻳﺎل ﻣﻮرد اﺳﺘﻔﺎده در آﻧﻬﺎ ﺗﻌﻴﻴﻦ ﻣﻲ ﺷﻮﻧﺪ و ﺛﺎﺑﺖ ﻣﻲ ﺑﺎﺷﻨﺪ. در ﺣﺎﻟﻲ ﻛﻪ در ﻳﻚ ﺑﻴﺮﻳﻨﮓ ﻣﻐﻨﺎﻃﻴﺴﻲ ﻓﻌﺎل ﻣﻲ ﺗﻮان ﺑﻪ راﺣﺘﻲ و ﺑﺎ ﺗﻐﻴﻴﺮ ﭘﺎراﻣﺘﺮﻫﺎي ﻛﻨﺘﺮﻟﺮ ﺑﺮاﺳﺎس ﻧﻴﺎز ﭘﺮوﺳﻪ آﻧﻬﺎ را ﺗﻐﻴﻴﺮ داد.
ﺑﺎ وﺟﻮد ﺗﻤﺎم اﻳﻦ ﻣﺰﻳﺘﻬﺎ، ﻣﺤﺪودﻳﺘﻬﺎﻳﻲ ﻧﻴﺰ ﺑﺮاي اﻳﻦ ﻧﻮع ﺑﻴﺮﻳﻨﮕﻬﺎ وﺟﻮد دارد. اﻳﻦ ﺑﻴﺮﻳﻨﮕﻬﺎ از ﺑﺎﺑﺖ ﻫﺰﻳﻨﻪ از ﺑﻴﺮﻳﻨﮕﻬﺎي ﻣﻜﺎﻧﻴﻜﻲ ﮔﺮاﻧﺘﺮ ﻫﺴﺘﻨﺪ و ﺑﺮاي ﺳﺎﺧﺖ آن ﺑﺎﻳﺪ از اﻓﺮاد ﻣﺘﺨﺼﺺ و ﺗﻜﻨﻮﻟﻮژي ﭘﻴﺸﺮﻓﺖ و ﻣﺘﺮﻳﺎل ﺧﺎص ﺟﻬﺖ ﻃﺮاﺣﻲ، ﺳﺎﺧﺖ، ﻧﺼﺐ و راه اﻧﺪازي اﺳﺘﻔﺎده ﻛﺮد ﻛﻪ ﻫﻤﺸﻪ در دﺳﺘﺮس ﻧﻴﺴﺘﻨﺪ. ﻫﻤﭽﻨﻴﻦ ﺑﺮاي اﺳﺘﻔﺎده در ﻣﺤﻴﻄﻬﺎي ﺑﺎ ﺣﺮارت ﺑﺎﻻ ﻣﻴﺰان ﻧﻴﺮوي ﺗﻮﻟﻴﺪ ﺷﺪه ﺗﻮﺳﻂ اﻟﻜﺘﺮو ﻣﮕﻨﺘﻬﺎ ﻛﺎﻫﺶ ﻣﻲ ﻳﺎﺑﺪ و ﺑﺮاي رﻓﻊ آن ﺑﺎﻳﺪ در ﻃﺮاﺣﻲ اﺛﺮ دﻣﺎ روي ﻣﻴﺪان ﻣﻐﻨﺎﻃﻴﺴﻲ را در ﻧﻈﺮ ﮔﺮﻓﺖ و از ﻣﺘﺮﻳﺎل ﺳﺎزﮔﺎر ﺑﺎ دﻣﺎي ﺑﺎﻻ اﺳﺘﻔﺎده ﻛﺮد.
نویسنده: ایوب ملائی